
Mechanical Engineering Seniors Design insect-inspired robot to assist first responders

The ARDENT team pose for a photo with advising professor Amiel Hartman (far right) outside Jacaranda Hall. Photo courtesy of Holland Mills.
With a team of CSUN students specializing in a variety of disciplines, Nathan Boyd and Holland Mills led the effort to create an insect-inspired robot that can aid first responders in navigating dangerous topography and collapsed structures, reducing the risk to rescue personnel.
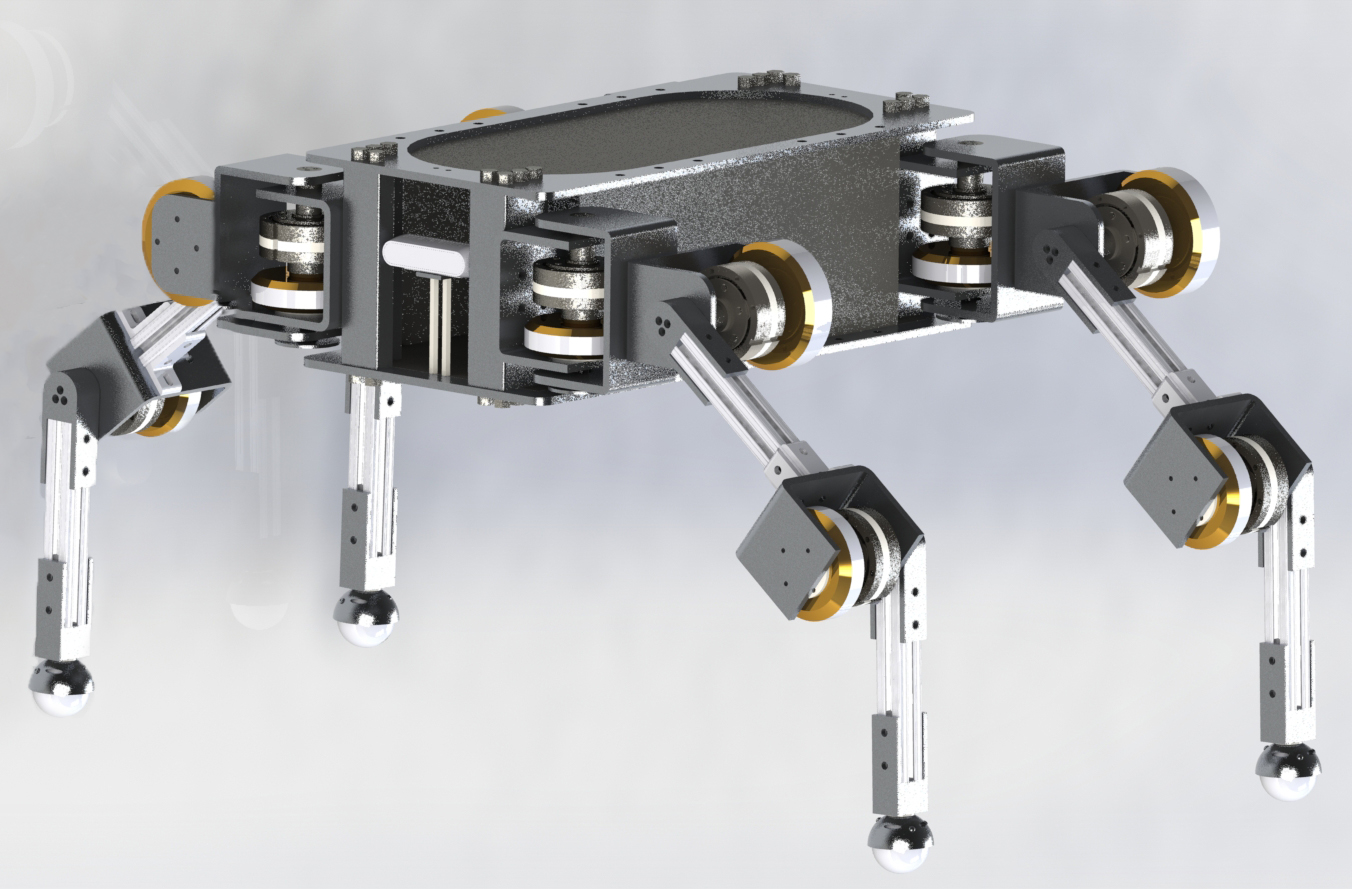
A multilegged walking robot, ARDENT (Arthropod Robot for Dynamic Environments and Terrains) is designed to assist search-and-rescue teams in precarious terrain — like many of the areas around Northridge and the region after the 1994 earthquake that devastated the campus and much of the Los Angeles area. Its main purpose, Mills said, is to protect first responders and minimize the loss of human life in the process of saving others.
“If the robot gets destroyed, that’ll be pretty bad,” said Mills, who, along with Boyd, completed his bachelor’s in mechanical engineering in May 2019. “But at least we didn’t lose a human life.”
ARDENT’s four-legged design was inspired by the anatomy of an insect and boasts impressive mobility around debris and other “unstructured” terrain. It has a span of 52 inches but can compress to 12 inches, allowing the robot to squeeze into areas human rescuers cannot.
ARDENT can be controlled remotely, allowing rescue teams to scout one area while it searches another. Its simultaneous localization and mapping (SLAM) technology then uses sensors to generate a 3-D map of the space — which can later be translated into a 2-D map. The student team behind the project tested this technology on campus by generating a 3-D map of Jacaranda Hall, where most of the project research and robot construction took place.
The concept of a multilegged search-and-rescue robot began as a response to the 2015 U.S. Defense Advanced Research Projects Agency’s Robotics Challenge. The competition inspired Boyd and Mills to come up with their own design and develop it as their senior capstone project at CSUN.
The project also created new opportunities within CSUN’s mechanical engineering program to cross-integrate different disciplines.
ARDENT’s team was composed of 18 CSUN students and five volunteers specializing in mechanical engineering, computer science, computer and electrical engineering, and manufacturing systems engineering and management.